步进电机的构造(以5相步进为例)
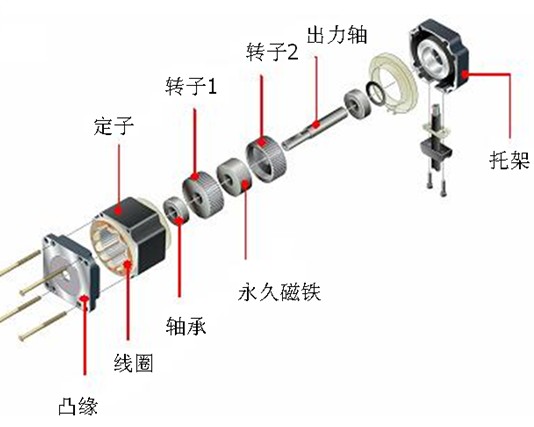
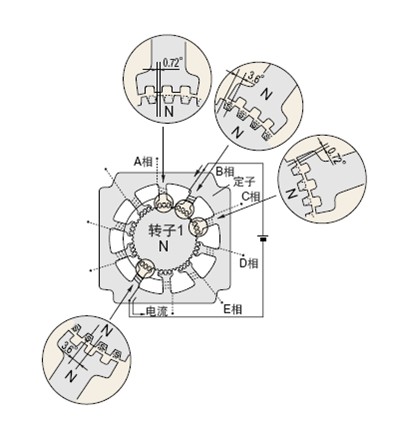
步进电动机构造上大致分为定子与转子两部分。 如下图:
转子由转子 1、转子 2、永久磁钢等 3 部分构成。而且转子朝轴方向已经磁化,转子 1 为 N 极时,转子 2 则为 S 极。
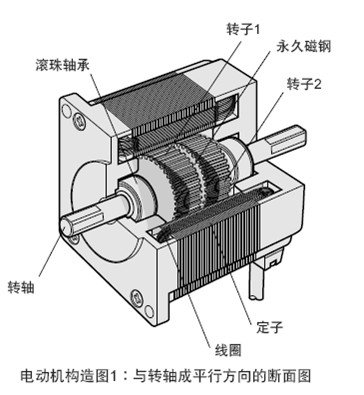
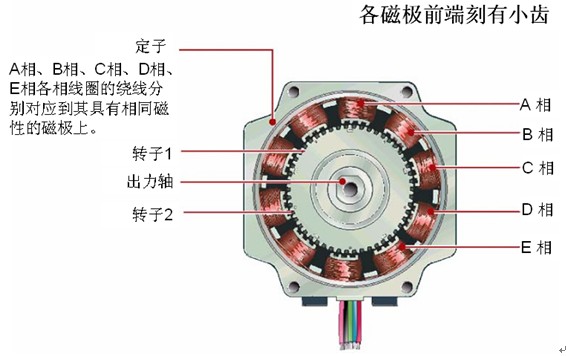
定子拥有小齿状的磁极,共有 10个,皆绕有线圈。 其线圈的对角位置的磁极相互连接着,电流流通后,线圈即会被磁 化成同一极性。(例如某一线圈经由电流的流通后,对角线的磁极将 同化成 S 极或 N 极。) 对角线的 2个磁极形成 1个相,而由于有 A相至 E相等 5个相位,因此称为 5 相步进电动机。
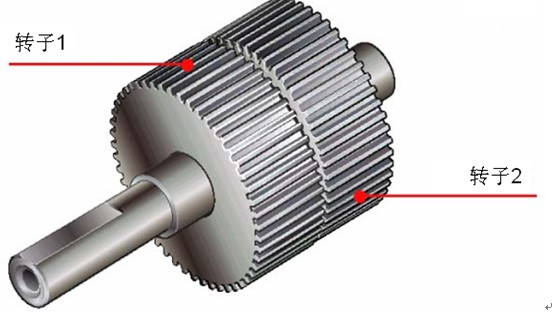
转子的外圈由 50个小齿构成,转子 1 和转子 2 的小齿于构造上互相错开 1/2 螺距。由此转子形成了100个小齿。目前已经有转子单个加工至100齿的高分辨率型,那么高分辨率型的转子就有200个小齿。因此其机械上就可以实现普通步进电机半步(普通步进电机半步需要电气细分达到)的分辨率。
步进电机的运转原理
实际上经过磁化后的转子及定子的小齿的位置关系,在此说明如下。 首先解释励磁,励磁就是指电动机线圈通电时的状态。
● A相励磁
将 A 相励磁,会使得磁极磁化成 S 极,而其将与带有 N极磁性的 转子 1 的小齿互相吸引,并与带有S极磁性的转子 2 的小齿相斥, 于平衡后停止。此时,没有励磁的 B相磁极的小齿和带有 S极磁性 的转子 2 的小齿互相偏离 0.72°。以上是 A 相励磁时的定子和转子小齿的位置关系。
● B相励磁
其次由 A 相励磁转为 B 相励磁时,B 相磁极磁化成 N 极,与拥有 S极磁性的转子 2 互相吸引,而与拥有 N极磁性的转子 1 相斥。
也就是说,从 A 相励磁转换至 B 相励磁时,转子转动 0.72°。由此可知, 励磁相位随 A相→ B相→ C相→ D相→ E相→ A相依次转换,则步进电动机以每次 0.72°做正确的转动。同样的,希望作反方向转动时,只需将励磁顺序倒转,依照 A相→ E相→ D相→ C相→ B相→ A相励磁即可。
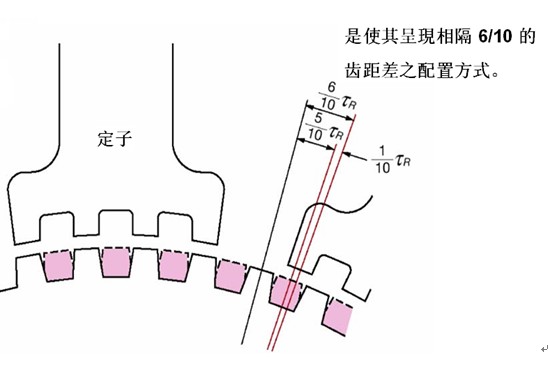
0.72°的高分辨率,是取决于定子和转子构造上的机械偏移量,所以不需要编码器等传感器即可正确的定位。下图就5相步进每次的位移量是0.72°进行更详细的说明:
由于第一组定子正好与转子相对应吸引。就势必会导致第二组定子与对应的转子相偏离(定子与转子齿距一样,但是各自所在的2个圆不一样大)。而这个偏离值正好是齿距的十分之一。因此普通5相步进的步距角为:360°/50齿/10=0.72°
高分辨率5相步进的步距角为:360°/100齿/10=0.36°
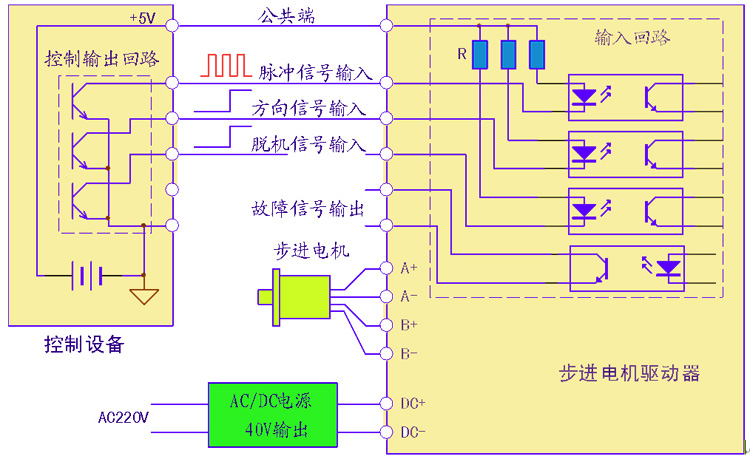
另外,就停止精度而言, 会影响的只有定子与转子的加工精度、组装精度、及线圈的直流电阻的不同等而已,因此可获得 ±3 分(无负载时)的高停止精度。 实际上步进电动机是由驱动器来进行励磁相的转换,而励磁相的转换时机则是由输入驱动器的脉冲信号所进行。以上举的是 1相位励磁的例子,实际运转时,为有效利用线圈同时进行 4相或 5相励磁的。

上图为常用步进电机和步进驱动器的接线图
步进电机动态指标及术语
1、步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
2、失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
3、失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
4、最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
5、最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
6、运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。
其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,步进电机输出力矩越大,即电机的频率特性越硬。












 咨询PLC培训请
咨询PLC培训请