三角测量的原理
如上图所示,半导体激光发出的激光束照射在目标上。接收器透镜聚集目标反射的光线并聚焦到感光元件上。 当与目标之间的距离发生改变时,通过接收器透镜的反射光的角度会随之改变,光线聚焦在感光元件上的位置也有所不同。
时间测量的原理

在发光的激光照射到物体并返回的时间内测量距离。不会影响工件的表面状态,可进行稳定检测。检测右图中接收激光反射光的时间T,并计算距离Y。
计算公式: 2Y(往返距离) = C(光速) × T(接收反射光的时间)。
共焦测量的原理
测量部内部有镜头。镜头分别有固定的焦点距离,镜头的焦点距离设定为 F。使用该镜头聚光时,高度为 F 时则焦点重合 ,光线聚为1点。高度偏离 F 时,光线逐渐变模糊。
 如下图所示,对焦位置通过针孔的反射光量最强的位置。
如下图所示,对焦位置通过针孔的反射光量最强的位置。
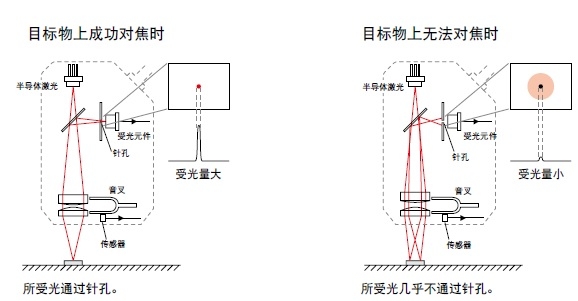
确定了该反射光量最强时音叉(镜头)的高度,目标物是否位于与该处相距焦点距离 F,便一目了然。通过 内部传感器高精度读取此时的音叉(镜头)位置,即可测量与目标物的距离。 由于是测量对焦高度,因此可不受目标物材料、颜色、倾斜等的影响,实现准确测量。













 咨询PLC培训请
咨询PLC培训请